RCメカの組み込み | |


| |
|
前回でスカートがキャタに干渉していたので、スカートとシャーシの間に0.5mmのプラ版をはさんで、スカートを広げています。 スカートはすでに接着(瞬間接着剤を盛り付けて、硬化促進剤でガチガチに)してあったので、取り外すのが大変でした。 結局スカートのパーツは割れて使い物にならず、もう一キットから新しい部品を持ってきました.....結局今回も2キット使用するはめに...(ioi) 後ろの転輪が大きすぎてはやりスカートとの間が狭いので、転輪の外周を削って、若干小さくしています。 | |
| |
|
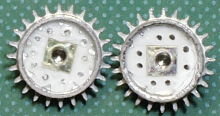
起動輪の固定は、起動輪の内側を削って、ナットを埋め込みました。 ナットは、プラ版に固定して、プラ版ごと起動輪の内側に接着し、瞬間接着剤を流し込んで硬化促進剤で固めています。 | |


| |
|
モーターは小型サーボ「444」(モデルクラフト)に使用されているものを使いました。 バッテリーはポケットアーマー同様、単四電池3本をシャーシの底から入れれる様に、底に電池交換用の穴を空けました。 | |


| |
|
電池ボックスはポケットアーマーのシャーシをカットして使用しました。 RCの基盤は電池ボックスの上に取りつけています。 | |



| |
|
電池ボックスを基盤ごとシャーシに取りつけ、モーターに配線します。 電池を入れて蓋をすればメカは完成!! サーボや複雑なスイッチを作らなくて良いので、さすがにメカの組み込みは簡単です! | |

| |
|
いよいよテスト走行!! は、速いぃぃ.. ポケットアーマーの2倍以上のスピードが出ます!(キットが小さいので、よけい速く感じます。)しかもスピード調節がないので、いつでも全速!...(^^;; キャタピラのたるみや、サスの動きを楽しみながら.......とは程遠い動きです... とりあえず、キャタも外れず軽快に走行します。 思ったよりもスムーズに動きますが......でもやっぱ速すぎ...(^^; | |
![]()
最終更新日1999.4.11